員體系")
")























作品詳情
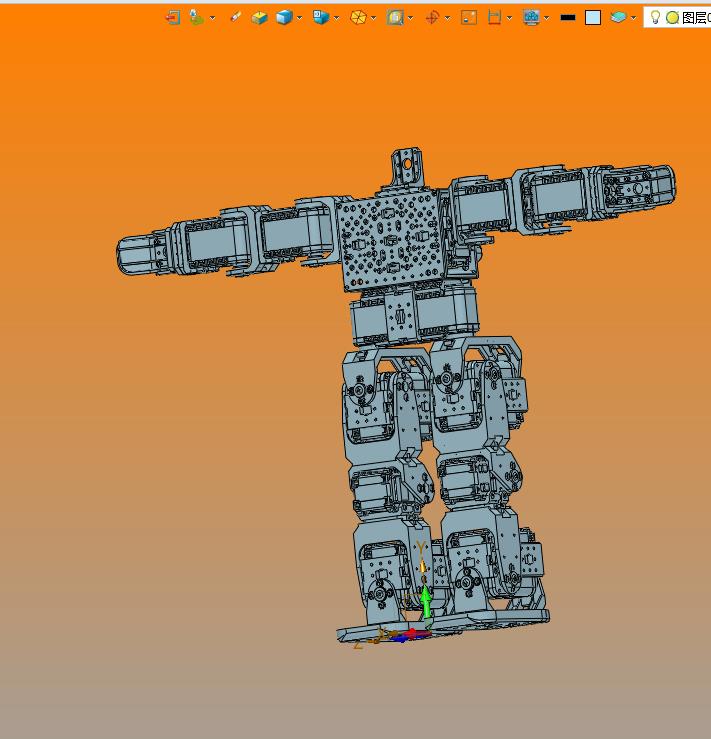
通過仿真軟件模擬多關(guān)節(jié)電機(jī)驅(qū)動(dòng)的機(jī)器人行走過程,涉及機(jī)器人動(dòng)力學(xué)、控制理論及計(jì)算機(jī)仿真技術(shù)。機(jī)器人通過多個(gè)關(guān)節(jié)電機(jī)協(xié)調(diào)運(yùn)動(dòng),實(shí)現(xiàn)復(fù)雜步態(tài)和軌跡規(guī)劃。仿真過程需精確建模電機(jī)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)特性,并優(yōu)化算法以實(shí)現(xiàn)穩(wěn)定行走。這一過程涉及多學(xué)科融合,對機(jī)器人技術(shù)研發(fā)具有重要意義。



平diy桌面級快速成型3D打印機(jī)")
卡丁車四輪沙灘車")
電機(jī)4軸高精度自動(dòng)化機(jī)械臂")


動(dòng)臺袋子印畫設(shè)備")



")
床")

全面罩")
擠出頭加熱鋁塊黃銅打印頭噴嘴")


